
 構造・特長
構造・特長
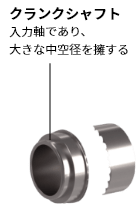
【構造】高い精度をカタチにした構造。
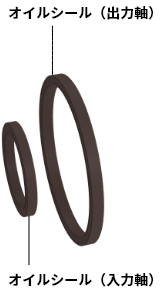


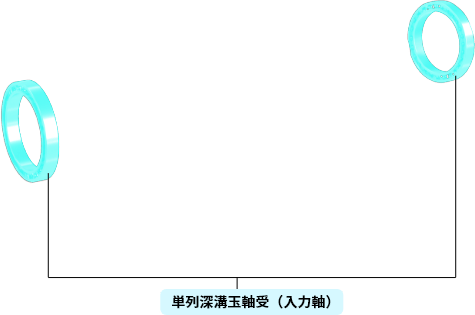


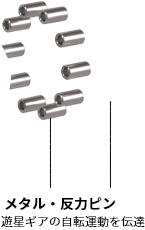



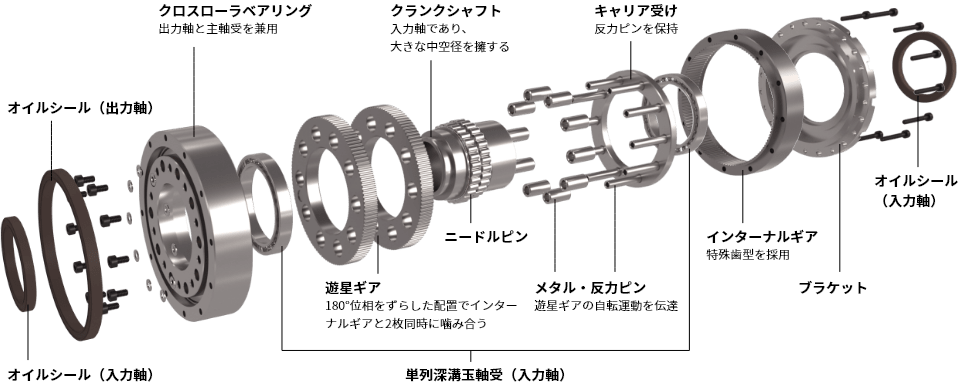
・入力であるクランクシャフトの回転に沿って2枚の遊星ギアが公転しながら自転し、
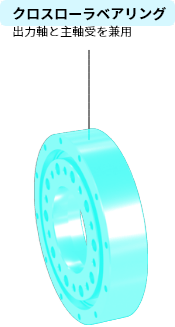
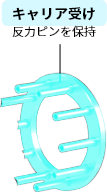
その自転運動を反力ピンとメタルを介して出力であるクロスローラベアリングに伝達します。
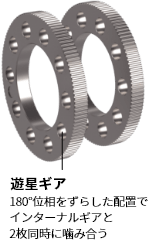
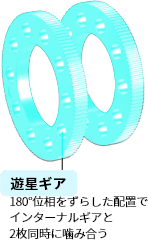
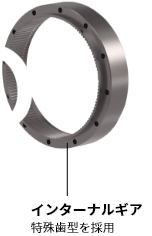
・1段減速ながら180°位相がずれた2枚の遊星ギアが同時に
インターナルギアに噛み合うことで、回転時のアンバランスを回避します。
【特長】高剛性・高トルク・大きな中空径
差動減速機構(偏心揺動型)の採用により、高いねじれ剛性・許容トルクを実現しました。減速比が変わっても歯車のかみ合い率がほぼ変わらないため、低減速比でも大きなトルクを得ることが出来ます。また、大きな中空径は配線、配管、シャフト等を通しやすく、ロボットや機器の設計自由度が大幅に拡張。生産性向上に貢献します。

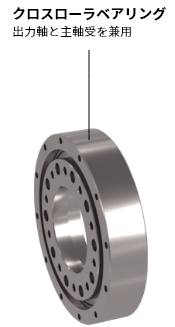
最高のパフォーマンスを追求した設計。
出力軸と一体化したクロスローラベアリングを採用することで、コンパクトでありながら高いモーメント剛性を確保しました。減速比が変わっても歯車のかみ合い率がほぼ変わらないため、許容トルクは一定。低減速比でも大きなトルクを得られます。

設計の自由度を向上させる大口径中空。
大きな中空径は、配線、配管、シャフト等を通しやすくするだけでなく、配線数を増やしたり、太い配線も筐体内に収める事が可能。ロボット本体及び周辺機器との干渉を回避し、屈曲や引っ張り等の負荷を軽減します。

高剛性減速機の構造を動画でご紹介いたします
公開日:2021.7.27 画像をクリックすると映像をご覧いただけます。
動画はYouTubeを利用しています。